
Nomad XR4000 battery balancing circuit
The nomad XR 4000 robot has four lead acid batteries in series. The problem is that even with batteries from an identical batch, minute differences between the batteries makes them charge unevenly.
To combat this problem we made the following battery balancing circuit.
The problem is that batteries that are charged has a potential of over 13.8 volts, while other batteries have potentials of only 10 volts and don't get charged. One circuit is placed in parallel with each of the batteries.
If the potential across the battery is lower than 13.8 volts, the circuit does nothing, if the potential raises above 13.8 the transistor starts to switch on placing the resistor in parallel with the battery until the potential is pulled down to 13.8. You can think of it as a glorified zener diode, with a lot sharper on elbow on the voltage vs current curve, the LM431 is a tunable zener diode. A potentiometer allows you to set the ~13.8 volt on/off point for the circuit. We set the pot. using a variable workshop supply to just start to turn on at 13.8 volts (you'll see the current drawn go way up when it does).
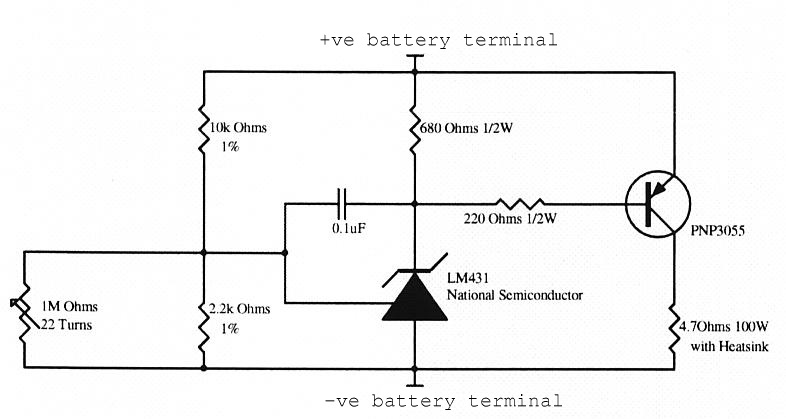
Because of the potential worst case scenarios for the system the resistor and transistor have to be rated quite highly. In reality though the resistor and transistor rarely get warm.
The circuit has been in the robot for over two years and the batteries have not had to be replaced or charged on separate chargers since.

[ 發表回應 ] ( 125預覽 ) | 常註連結 |

 ( 3.1 / 2105 )
( 3.1 / 2105 ) 日曆
日曆




